




La sonda sigue siendo uno de los equipos de a bordo más vendidos y, sin duda, con mayor oferta en el mercado, con más de 400 modelos para la náutica de recreo. Elegir una no siempre resulta fácil, de forma que para hacerlo deberemos tener en cuenta varios factores dependiendo del uso que hagamos de la sonda y de la zona de navegación. A. Brel

Con las nuevas generaciones, estamos lejos de los antiguos modelos de flash, que únicamente indicaban la profundidad, o de la sonda gráfica, que representaba el perfil del fondo. Actualmente, los nuevos modelos de sondas ofrecen mucha información y de calidad, pero es necesario tener ciertos conocimientos para saber interpretarlas y comprender los nuevos términos utilizados, algunos de los cuales provienen de las imágenes electrónicas.
No existe una sonda universal que se adapte a todas las necesidades por igual, por lo que hay que elegir.
La elección acertada
Ante la infinidad de los modelos que ofrece el mercado, no resulta fácil inclinarse por un equipo determinado. Y es que no se trata de una cuestión de presupuesto, sino de uso. Por lo tanto, esta es la primera pregunta que debemos plantearnos. Cuando ojeamos un catálogo, la lista de términos técnicos es larga y difícil de comprender, ya que muchas de las funciones de las sondas adoptan vocablos nuevos y propios. Con el fin de aclarar mejor esta terminología, publicamos un glosario de las funciones y distintos términos sobre las sondas.
La sonda en el velero
En un velero, la elección de la sonda es relativamente simple. A menudo, una sonda digital (dígitos) o analógica (con aguja) va integrada en el equipo de navegación. Si necesitamos una sonda de profundidad algo más completa para seguir una línea de trazado de fondo (veril), ver el relieve del fondo para hallar una zona adecuada para el fondeo o practicar la pesca ocasional, no necesitaremos invertir mucho.
Hace unos años se recomendaba una calidad de pantalla monocromática en lugar de la de color, que apenas se leía bien a plena luz del día. Ahora, las pantallas a color de última generación tienen una definición excelente y se leen bien a pleno sol. En el mercado podemos encontrar equipos por menos de 250 euros (Garmin, Humminbird, Lowrance, etc.), sondas a prueba de agua que pueden, según el modelo, ser de doble frecuencia, tener la función Down Imaging, etc.
Una sonda en una embarcación a motor
Esencialmente mantendremos los mismos criterios que para un velero, aunque la ubicación de la sonda puede ser diferente. En un barco a motor, con fueraborda o dentrofueraborda, monomotor, el transductor de la sonda debe estar situado aproximadamente a 45 cm de la línea de crujía de la embarcación, y siempre debe colocarse en el costado hacia donde gira la hélice, si es dextrógira, que es lo habitual en un monomotor, será a estribor.
En barcos con dos motores, debe estar equidistante a ambos motores. En un barco con un motor interior (con eje, ya sea velero o motora), el sensor o transductor deberá estar en frente de la quilla, en un lugar donde no se vea afectado por el flujo de agua.
En cuanto al modelo de sonda, todo dependerá del uso que pretendemos hacer de ella. Para la pesca ocasional, podremos optar por un modelo de rango medio; y para la pesca de competición o de alto nivel, la oferta es enorme, como veremos.
Criterios importantes a considerar
>> La frecuencia
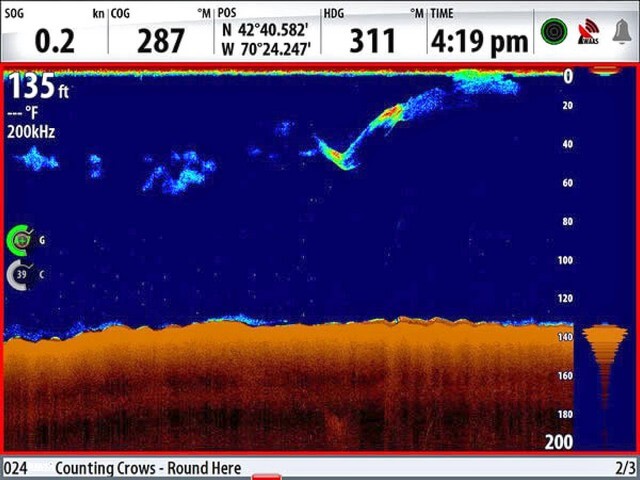
En una sonda sencilla, lo habitual son 200 kHz. Esta frecuencia no permite sondear más allá de 200 m, independientemente de la potencia. A cambio, proporciona una excelente definición de fondos de menos de 50 m. Mientras que este tipo de modelos se mantiene en un rango de precios inferior a los 500 euros, cada vez hay más modelos bifrecuencia o incluso multifrecuencia. La segunda frecuencia que se selecciona es generalmente 50 kHz. Permite sondear a profundidades mucho mayores que los 200 kHz, y aquí sí interviene la potencia. Cuanto mayor sea ésta, mayor será la profundidad alcanzada. Pero con 50 kHz, la definición es algo inferior a poca profundidad. A igual potencia, en profundidades inferiores a 200 m, cuando se detecta un objetivo de 4 cm en 200 kHz, un objetivo deberá ser al menos de 10 cm para que pueda detectarse con 50 kHz.
También hay modelos con funciones de discriminación para detectar los peces más próximos.
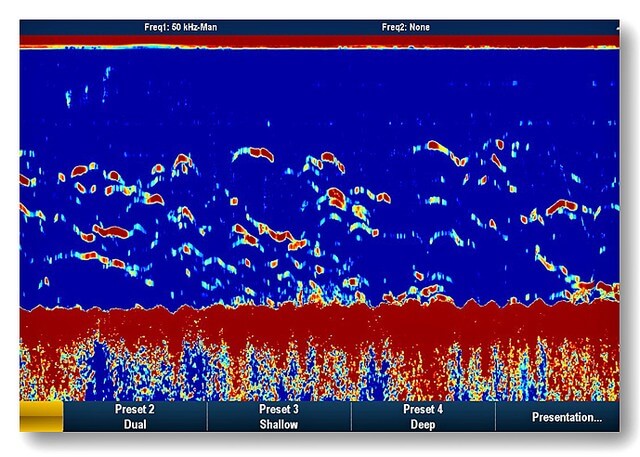
En las profundidades pequeñas, con 200 kHz, vemos los dos objetivos, y con 50 kHz solo uno. A partir de los 200 m, por el contrario, con 50 kHz se pueden alcanzar, dependiendo de la potencia, profundidades significativas de varios cientos de metros.
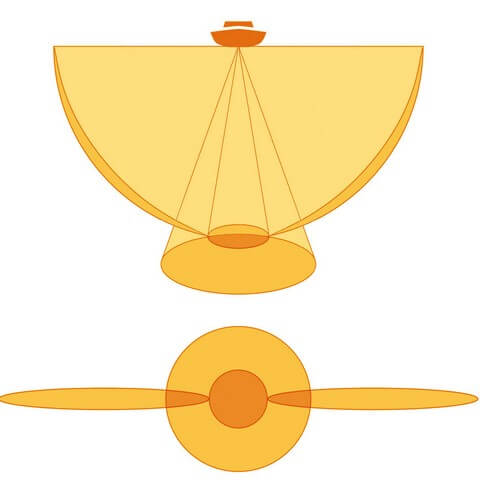
Una sonda tiene un ángulo de emisión de su haz de señales. Cuanto mayor sea este ángulo, mayor será el área explorada a una profundidad dada, pero la profundidad también será menor. Por ejemplo, a una profundidad de 60 m, un ángulo de emisión de 20° permite sondear un diámetro medio de 25 m; con un ángulo de 60° un diámetro de 60 m; y con un ángulo de 90°, un diámetro de 120 m.
Para obtener imágenes de calidad de amplias superficies del fondo, aunque a expensas de la profundidad, los fabricantes ofrecen sondas multifrecuencia. Tenemos, por ejemplo, sondas de triple frecuencia, 83 kHz, 200 kHz y dos veces 455 kHz. La frecuencia de 200 kHz emite un haz central de 20°, el de 83 kHz uno de 60° y los haces de emisión en 455 kHz cubren una superficie lateral de cada lado de la embarcación. Esto proporciona una cobertura de 90° pero con una profundidad máxima de 50 m.
>>La potencia
En sondas de frecuencia única de 200 kHz, la potencia no es importante, pero es fundamental cuando la sonda es de 50 kHz. La profundidad sondeada es directamente proporcional a la potencia. Pero, cuidado, no todos los fabricantes emplean los mismos términos para definirla. La potencia debe darse en vatios RMS. Algunos lo dan en vatios de CC (pico a pico). La diferencia entre ambos (RMS y CC) está en una relación de uno a ocho. De hecho, una de 800 vatios CC corresponde a una de 100 vatios RMS.
A modo indicativo, tenemos que en una sonda de 200 kHz con una potencia de 100 a 300 W RMS, podemos esperar alcanzar los 150 m. Y una sonda de 50 kHz, con una potencia de 300 vatios RMS, puede alcanzar los 500 m. En resumen, una sonda de 200 kHz proporciona una buena definición en profundidades inferiores a 200 m. Los 50 kHz se vuelven interesantes más allá de 150 m y a esta profundidad, la potencia tiene su importancia. Las sondas de multifrecuencia permiten ensanchar la superficie estudiada a poca profundidad.
>>La calidad de la pantalla
Los ordenadores, los teléfonos inteligentes, las tabletas y los televisores han contribuido en gran medida al desarrollo de las pantallas, especialmente en cuanto a su visibilidad a plena luz del día. Y los fabricantes de sondas han aprovechado estos avances en sus equipos.
En las sondas más básicas, las pantallas TFT de alta definición (visibles al sol) tienen una resolución mínima de 272 x 480 píxeles. En equipos superiores de alta gama las pantallas pueden alcanzar o superar resoluciones de 800 x 480 píxeles.
En resumen, para una buena visibilidad, especialmente cuando la pantalla se instala en exterior, es mejor optar por una TFT de máxima resolución. Deberemos evitar modelos de generaciones anteriores, que fácilmente se pueden encontrar a precios muy tentadores pero no se pueden leer a plena luz del día.
El lenguaje de las sondas estándar
Con las nuevas generaciones de sondas, los diseñadores utilizan un lenguaje que no siempre es inteligible. Para poder interpretar mejor las instrucciones, ofrecemos este glosario con los términos más utilizados.
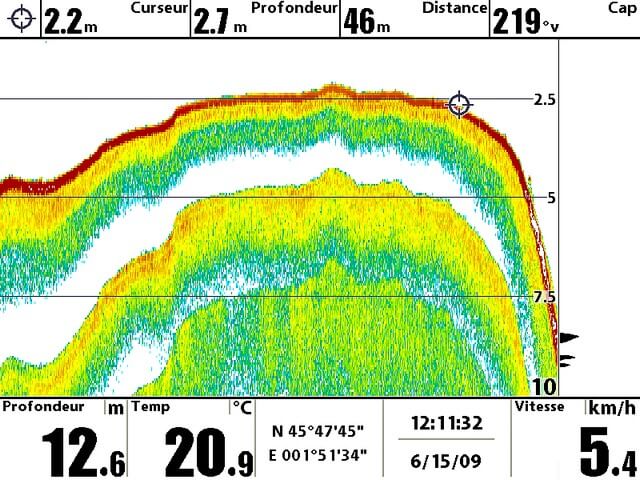
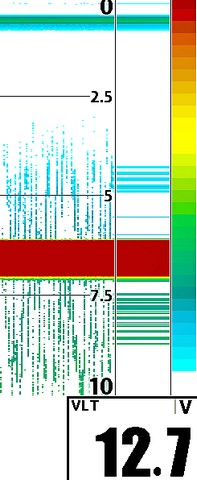
– A-SCOPE: representación de ecos de bancos de peces y del fondo como líneas horizontales cuyos colores (pantallas de color) y longitud dependen de la intensidad de los ecos.
– Alarma de pez (Fish): se dispara cuando hay un eco entre la superficie y el fondo.
– Anti Clutter (SCC): reduce la sensibilidad cerca de la superficie y la aumenta gradualmente en función de la escala.
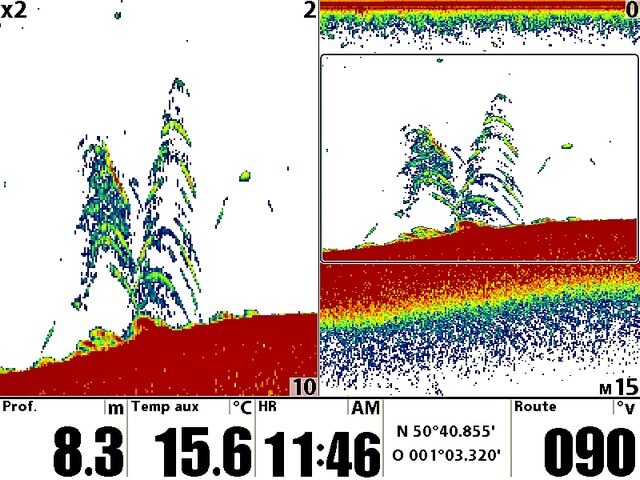
– Auto Shift (Botton Trace): esta función consiste en mantener un rastro del fondo en el centro de la imagen, en una media pantalla, manteniendo una escala de representación constante.
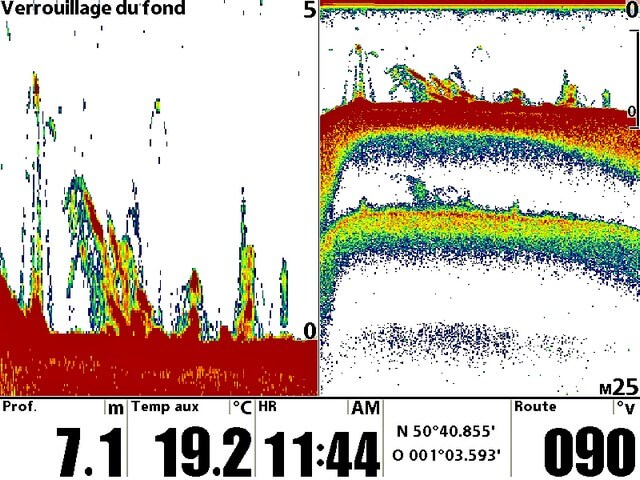
– Bottom Lock: permite aumentar, mediante efecto lupa, el fondo. La pantalla muestra en el lado derecho la vista normal del fondo; y en el lado izquierdo el 25% de la escala que está sobre el fondo.
– Fastrack: evita cuando uno está parado (fondeado) el ver la imagen desplazándose.
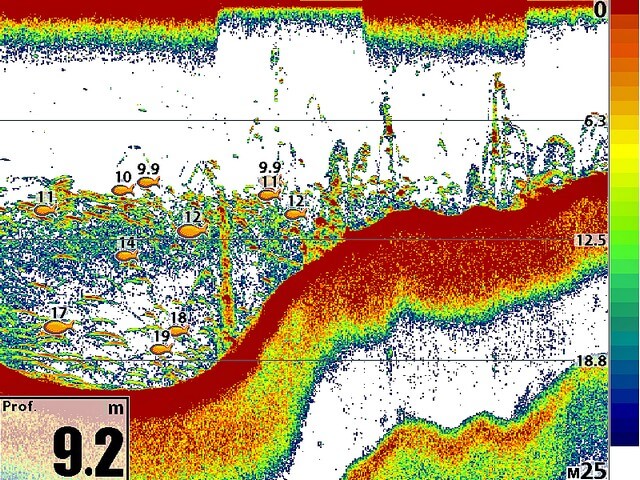
– Fish Track: indica la profundidad de cada eco. Útil para detectar bancos de peces.
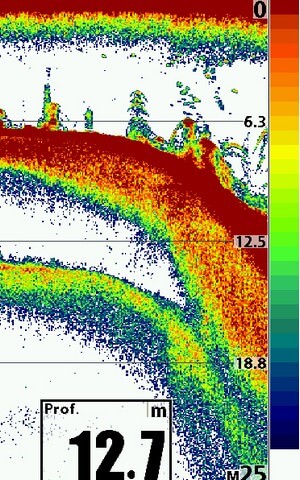
– Línea blanca (whiteline): resalta el retorno de la señal del fondo más denso para establecer claramente su contorno y su estructura (rocoso, arenoso, etc.).
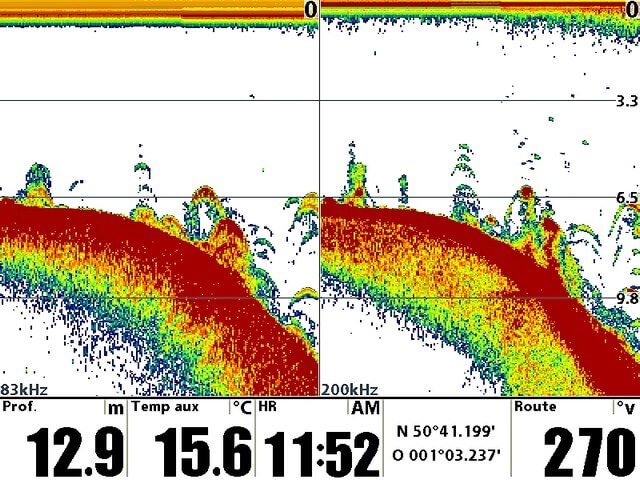
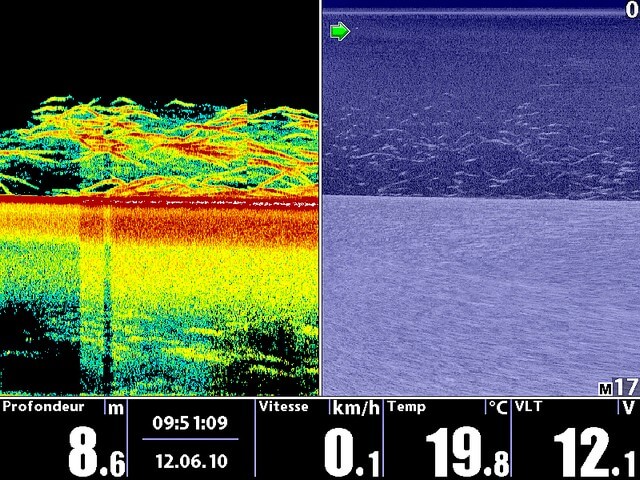
– STD / DUAL: pantalla dividida que generalmente muestra a la izquierda la imagen de 50 kHz y a la derecha la imagen de 200 kHz.
– STD / A-SCOPE: combina la imagen STD y el A-SCOPE a la derecha.
Sondas especiales
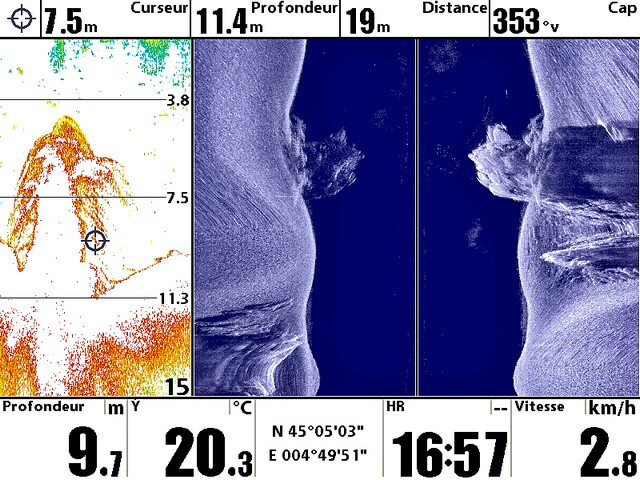
Acabamos de ver las sondas estándar, pero cada vez hay más modelos que van más allá de indicar la profundidad, la presencia de peces, el perfil del fondo, etc. Reproducen en la pantalla una imagen de calidad próxima a la calidad fotográfica o imágenes electrónicas. Humminbird fue uno de los primeros en presentar esta tecnología bajo el nombre de Side Imaging. Otros fabricantes como Lowrance (StructureScan), Raymarine (DownVision), Garmin (ClearVü CHIRP) también han desarrollado modelos específicos. Estas sondas no reemplazan a las tradicionales, pero a menudo integran funciones estándar e imágenes y, según la marca, van mucho más allá de lo que es una simple sonda. Se pueden comunicar entre sí (wifi), recuperar la imagen en un teléfono inteligente, guardar la imagen, etc. Estos modelos cuentan con su propio lenguaje, del que a continuación recogemos algunas definiciones.
El lenguaje de las sondas especiales
– Broadband-Banda ancha (Lowrance): muestra y etiqueta peces (grandes, carnada y objetivos) a altas velocidades y profundidades que pueden ser de varios cientos de metros.
– DownScan Overlay (Lowrance): permite sobreponer las imágenes detectadas del fondo sobre la cartografía. Esta función solo es posible si la sonda está equipada con StructureScan.
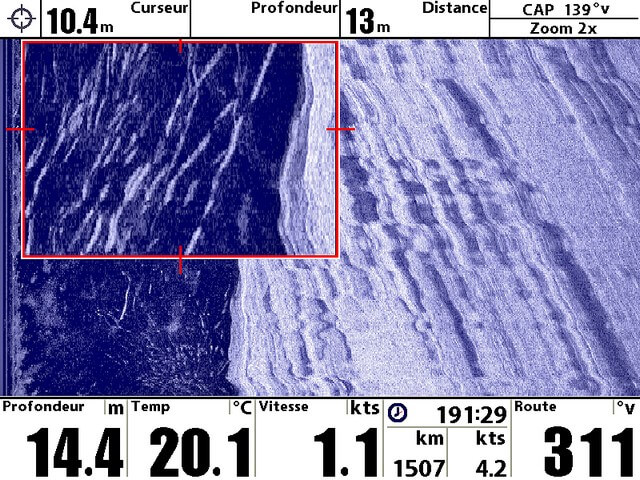
-Down Imaging (Humminbird): la sonda elegida para esta tecnología emite un haz muy fino de ondas de alta frecuencia. Esto permite obtener en la pantalla una imagen de calidad fotográfica de la zona de fondo que hay bajo el barco.
– DownVision CHIRP (Raymarine): esta tecnología de compresión de impulsos (CHIRP) permite que, gracias al amplio espectro de señales emitidas por la sonda, se obtenga una imagen detallada y precisa.
La tecnología CHIRP de Raymarine permite obtener imágenes con gran detalle.
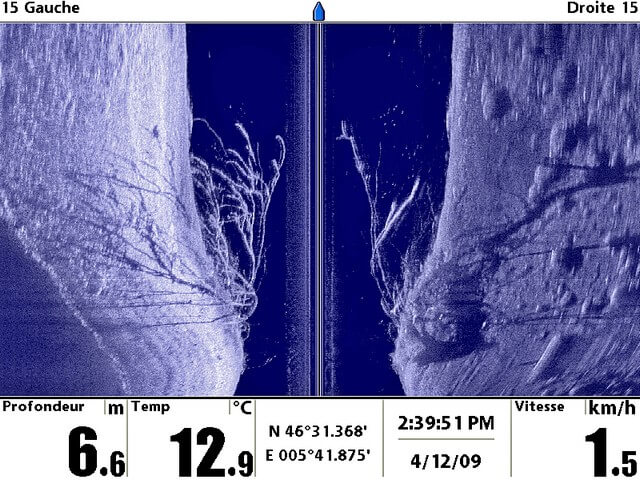
– Side Imaging (Humminbird): esta tecnología permite visualizar estructuras y peces a ambos lados del barco hasta 120 m (función de profundidad). Ofrece una imagen de calidad fotográfica, parecida a la que proporciona un escáner médico.
– StructureScan (Lowrance): proporciona vistas de 180° de calidad fotográfica (estructura y peces debajo del barco).
– Tecnología CHIRP (Garmin): A diferencia de una sonda convencional, que funciona en una o dos frecuencias, la tecnología CHIRP de Garmin es multifrecuencia. El fondo se escanea continuamente con bajas frecuencias, medias o altas. Los contornos se interpretan y muestran en la pantalla. La imagen es más clara que la de una sonda tradicional y de alta definición. Esta tecnología continúa evolucionando con el modo SideVü Ultra High Definition que ha salido al mercado hace relativamente poco tiempo.
Nuestra opinión
El mercado de las sondas evoluciona constantemente. Pero todos los fabricantes tienen en su catálogo valores seguros que estarán vigentes durante varios años. Pero, por supuesto, cada temporada aparecen modelos con nuevas funciones o incluso nuevas tecnologías. Por esta razón, es importante orientarse desde el principio hacia un producto que corresponda a su uso. Un buzo que busca restos de naufragio necesita imágenes de fondo con gran precisión, excelentes; un pescador, se centrará en la detección de peces; y para el navegante de recreo será suficiente una sonda que le proporcione datos exactos sobre la profundidad para que pueda detectar los bajíos.