77
Sistemas de sonda
[EQUIPO]
Institute), desarrolló un sistema
de medición de precisión para
ayudar al comandante Cousteau a
regular bajo el agua la distancia
focal de los objetivos de
sus cámaras. Durante las
pruebas se dio
cuenta de que el sistema servía
también para analizar las capas de
sedimentos. En 1965, el ingeniero
Martin Klein, desarrolló una
nueva sonda de barrido lateral para
encontrar barcos hundidos. De
hecho, esta fue la tecnología usada
para la localización del Titanic.
El sistema se basa en un
haz de gran ángulo orientado
perpendicularmente a la marcha
que analiza a cada impulso tramos
por los militares y los oceanógrafos
pero no llega a la náutica de recreo
hasta hace unos cuatro años.
Hasta entonces las ecosondas solo
utilizaban impulsos en una sola
frecuencia: 50 kHz para las grandes
profundidades y 200 kHz para los
fondos próximos.
Con los ecos monofrecuencia la
información a tratar es poca, poco
detallada y con mucho ruido. Sin
embargo, el sistema CHIRP utiliza
una señal modulada en un amplio
rango de frecuencias (banda ancha),
del orden de 28 a 210 kHz y de
más duración. De esta manera la
energía de la señal transmitida en el
agua es de diez a mil veces superior
a la de una sonda convencional,
lo que aumenta la capacidad de
“leer” los ecos entre cinco y diez
veces. Esto significa en la práctica
una mayor discriminación de los
objetivos próximos, peces por
ejemplo, hasta el punto que se
pueden distinguir los alevines de
los adultos. Las señales parásitas
también disminuyen, se aumenta
el alcance en profundidad, que
puede ir hasta 3.000 metros con
un seguimiento del fondo mejor a
altas velocidades. El reverso de la
medalla es que los componentes de
los transductores son más caros.
EL BARRIDO LATERAL
El barrido lateral se inventó para
explorar grandes superficies
y obtener imágenes precisas
del relieve submarino, el
tipo de fondo y la presencia
de objetos como minas o
pecios. En los años 60, Harold
Edgerton, profesor del MIT
(Massachussets Technological
¿Cómo funciona una sonda?
E
l sonar emite una señal de
corta duración y recibe el eco
reflejado por los objetos situados
en las proximidades del barco. El
emisor y el receptor de la señal
se instalan en una misma caja,
que es a lo que llamamos sonda o
transductor, instalado en el fondo
del casco o en la popa del barco.
La frecuencia de la señal se
mide en kHz y su velocidad es de
aproximadamente 1.500 m/s, que
es la velocidad de propagación de
los ultrasonidos en el agua. La señal se envía en una o más frecuencias
concretas (50 kHz para para grandes profundidades y 200 kHz para
fondos próximos) que se dispersan por la columna de agua situada bajo
el barco. La señal acústica que “ilumina” el fondo vuelve en forma de
eco, tanto más débil cuanto mayor es la profundidad, el fondo blando
y la frecuencia elevada; una señal de 12 kHz pierde la mitad de su
energía a 3.000 metros de profundidad mientras que una señal de muy
baja frecuencia puede recorrer centenares de kilómetros. Conociendo
la velocidad del sonido y el tiempo que tarda la señal en ir y volver, el
microprocesador del equipo calcula la distancia entre el transductor y el
fondo.
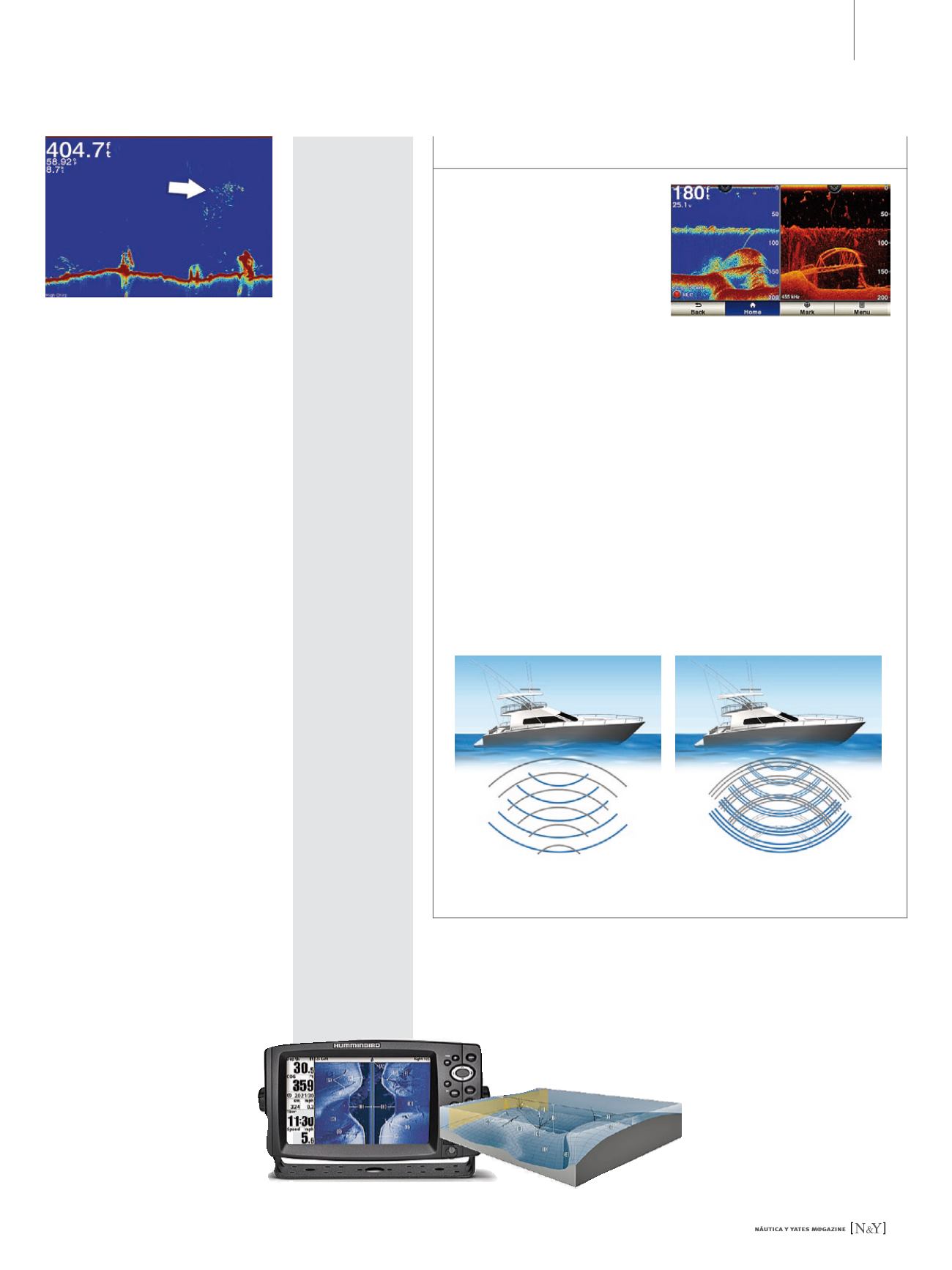
Esta captura de pantalla permite
visualizar las diferencias en el
tratamiento de los ecos de un
puente sumergido, en la visión
clásica a la izquierda y DownVü a la
derecha (imagen Garmin).
El sonar funciona según el principio del eco: la señal se envía al fondo y
la fuerza del eco devuelto indica la profundidad y el tipo de fondo.
Las imágenes
obtenidas con
el sistema
CHIRP permiten
visualizar ecos
de pequeños
objetivos
a mucha
profundidad
(imagen
Garmin).
Esquema de
funcionamiento
de la tecnología
de barrido
lateral Side
Imaging
(imagen
Humminbird).
Tradicional
Chirp


